
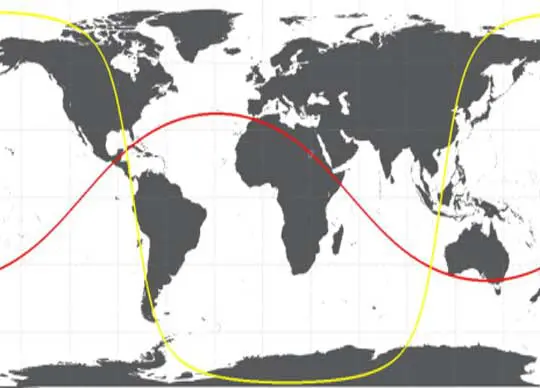
KSM1 and KSF1 inserted orbits.
Kleos Space has presented a technical paper (outlined below) on the capability of its radio frequency geolocation technology at the GEOINT21 symposium in the USA – the largest annual conference for geospatial intelligence.
The following keypoints were released to the ASX:
- Technical paper explains Kleos’ proprietary algorithms, geolocation system and measurement methodology.
- Includes a recent study performed over the Republic of Cabo Verde using data from Kleos’ Scouting Mission satellites, which confirmed high-levels of geolocation accuracy.
- Kleos’ satellites detect and geolocate radio frequency transmissions to improve the detection of illegal activity, including drug and people smuggling, piracy and border security challenges.
Kleos’ CTO Vincent Furia explained, “In order to present our technical capability at the GEOINT21 symposium, we are releasing a technical paper regarding how the RF data captured by Kleos’ constellation of satellite clusters is processed into geolocation information for our customers. We also showcase a recent study performed over the Republic of Cabo Verde, which elicited results confirming expected high levels of accuracy obtainable from the geolocation system, using a data capture coming from the Scouting Mission (KSM1) cluster of 4 satellites. Kleos continues to develop and deploy a constellation of satellite clusters, delivering revisit rates over key areas of interest with ever increasing operational value to the user. With every new cluster added, further data is collected, creating a higher value data set accessible by the various government and commercial users.”
Kleos’ Intelligence, Surveillance, and Reconnaissance (ISR) capability uses nano-satellite clusters operating in low earth orbit to collect data to geolocate radio frequency (RF) emissions. The capability seeks to geolocate emissions to detect illegal activity, including piracy, drug and people smuggling, border security challenges and illegal fishing. Its global activity-based data is sold as-a-service to governments and commercial entities, complementing existing commercial datasets.
HE CAPABILITY OF ITS RADIO FREQUENCY GEOLOCATION TECHNOLOGY
Kleos Space SA (KSS) intends to geolocate specific Radio Frequency (RF) transmissions utilising a constellation of clustered RF receivers in Low Earth Orbit (LEO). The geolocated RF transmissions provide a means of generating pattern-of-life data sets for reconnaissance, asset-tracking, and surveillance purposes.
The Geolocation System high level architecture is presented, and the geolocation system performance is provided based on a case study involving the Cape Verde VHF beacon and Kleos Scouting Mission (KSM1) cluster.
Kleos Space SA (KSS) intends to geolocate specific Radio Frequency (RF) transmissions utilising a constellation of clustered RF receivers in Low Earth Orbit (LEO). The geolocated RF transmissions provide a means of generating pattern-of-life data sets for reconnaissance, asset-tracking, and surveillance purposes.
Two KSS clusters have been inserted into orbits. The first cluster, Kleos Scouting Mission (KSM1), was launched by the Indian Space Research Organisation (ISRO) on the Polar Satellite Launch Vehicle (PSLV) campaign C49 into a 550km, 37-degree, circular orbit. The KSM1 cluster comprises four spacecraft flown
in a formation ensuring that all spacecraft receive the same RF signal whilst flying sufficiently distanced to ensure variation in the received signals required for the geolocation processing. The principal VHF Payload of each KSM1 spacecraft is a Software Defined Radio (SDR), with Very High Frequency (VHF) front-end
electronics tuned specifically to maritime frequency bands. The KSM1 spacecraft are also equipped with a VHF decoder for maritime Automatic Identification System (AIS) data packets.
The second cluster, Kleos Scouting Follow-on (KSF1), was launched by SpaceX from Cape Canaveral in Florida aboard the Spaceflight SXRS-5/SpaceX Transporter-2 Mission. Launched into a 525km Sun Synchronous orbit, Kleos’ second satellite cluster establishes coverage North and South of KSM1.
ACRONYM MEANING
- ADCS Attitude Determination and Control System
- AOA Angle Of Arrival
- CAF Cross Ambiguity Function
- DOP Dilution of Precision
- FDOA Frequency Difference Of Arrival
- ISRO Indian Space Research Organisation
- KSF1 Kleos Scouting Follow-on
- KSM1 Kleos Scouting Mission
- KSS Kleos Space SA
- REPORT NUMBER TITLE PROJECT
- KAP-NA-KSS-TN-026 Geolocation System Whitepaper KAP
- ISSUE NUMBER AUTHOR(S) ISSUED DATE PAGE
- 01-A RXO 04/10/21 5 of 10
- KSS-ST-TM-0022-RevC
- SECURITY CLASSIFICATION
- © 2021 Kleos Space SA UNRESTRICTED
- LEO Low Earth Orbit
- POA Power Of Arrival
- PSLV Polar Satellite Launch Vehicle
- RF Radio Frequency
- RMSE Root Mean Square Error
- SDR Software Defined Radio
- SNR Signal-to-Noise Ratio
- TDOA Time Difference of Arrival
- VHF Very High Frequency
- Table 1 – Acronyms.
GEOLOCATION SYSTEM
The Geolocation System is responsible for performing signal processing operations to detect and passively geolocate uncooperative targets transmitting in a frequency band of interest by using a set of receiving antennas at known positions. Passive geolocation is commonly achieved using techniques such as Time
Difference of Arrival (TDOA), Frequency Difference Of Arrival (FDOA), Angle Of Arrival (AOA), and Power Of Arrival (POA). The Geolocation System utilises TDOA and FDOA measurements for geolocation of the RF transmitters.
RF data is collected and timestamped with high accuracy on-board the four spacecraft along with Attitude Determination and Control System (ADCS) data providing the spacecraft location and attitude. Upon downlink of the data, the Geolocation System time aligns all the received data and performs time and
frequency slicing. The slicing considers the frequency bands used in Very High Frequency (VHF) maritime mobile communications [1], as well as physical phenomena relative to the motion of the spacecraft cluster, and the waveform of the captured signal. The time and frequency sliced RF signal 𝑥𝑖 coming from
the spacecraft 𝑖 is then correlated with the time and frequency sliced RF signal 𝑥𝑗 coming from the spacecraft 𝑗 using the Cross Ambiguity Function (CAF) [2]. The CAF performs a two-dimensional correlation function in time and frequency of the two discrete time signals 𝑥𝑖 and 𝑥𝑗 which are composed of
𝑁 samples (I). The presence of a correlation peak in the CAF indicates that a signal of interest has been captured by both spacecraft 𝑖 and 𝑗 whilst the absence of a correlation peak indicates that the signal of interest was only detected by one spacecraft (Figure 3). The arguments of the maxima of the CAF in the
presence of a correlation peak provide the TDOA and FDOA measurements (II).
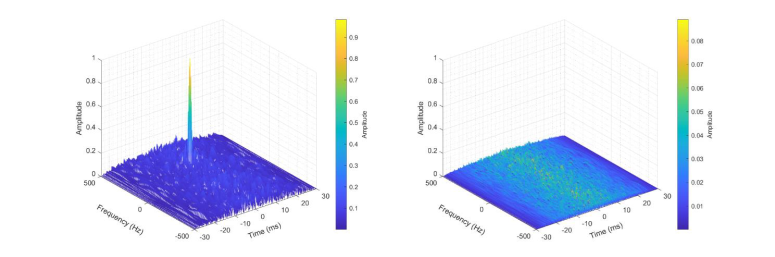
CAF illustration.
TDOA and FDOA measurements are then filtered using KSS proprietary algorithms to discard erroneous measurements caused by low Signal-to-Noise Ratio (SNR) values, interference, and false alarms raised by the CAF. Measurement filtering is done blindly (i.e., no beacons at known positions or signals with known pilot sequences are required) and increases the reliability of the measurements used for geolocation.
The remaining available measurements and the position of the target to be geolocated define a system of nonlinear equations involving the spacecraft attitude at the time when the measurements are taken. An altitude constraint is also added to the system of equations since the target is typically a maritime vessel which has a zero altitude. A minimum of two measurements are needed to estimate the target position (two TDOAs, or two FDOAs, or any combination thereof).
The more spacecraft, and hence measurements, the better the estimation accuracy of the geolocated position. The position estimation is performed using an iterative numerical nonlinear least-squares optimisation algorithm. Once the target position is obtained, the confidence ellipse parameters (semi-major axis, semi-minor axis, and orientation angle (Figure 4)) are computed by relying on the Dilution of Precision (DOP) concept, which depicts the relation between the spacecraft cluster, target geometry, and the Root Mean Square Error (RMSE) of the positioning errors.
After performing position estimation, the geolocation system provides: the carrier frequency of the detected transmitter, the mean reception time, the transmitter coordinates, and the confidence ellipse parameters.
CASE STUDY: CAPE VERDE BEACON GEOLOCATION USING KSM1 CLUSTER
The geolocation system performance is showcased using a data capture by the KSM1 cluster. The capture is taken during testing over the Republic of Cabo Verde (Cape Verde), where a Kleos Space SA (KSS) controlled beacon signal was transmitting at 4.2 W. The beacon signal comprises audio transmitted using
Analogue Frequency Modulation at 145.175 MHz. The estimated positions of the beacon have errors ranging from [0.32 km, 32km] (Figure 5). Each position has its own confidence ellipse. The confidence ellipse size depends on the DOP and the received signals quality (SNR and the presence of interference) at
the times when the captures are performed. The estimated position that provides the best DOP and quality of measurements trade-off has a confidence ellipse composed of 4.5 km semi-major axis and 0.26 km semi-minor axis.
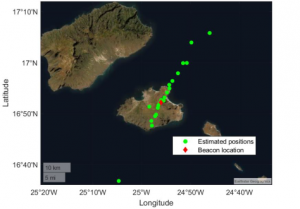
Estimated positions of the beacon using the geolocation system.
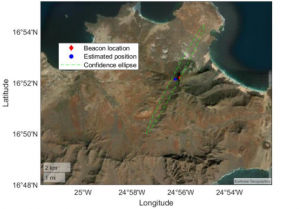
Confidence ellipse of the position estimate.
CLUSTER FORMATION DETAIL
The spacecraft clusters are placed to achieve a diamond-shape formation (Figure 7). The diamond geometry is used to minimize the Dilution of Precision and is optimized to maximize the accuracy of passive geolcation techniques including TDOA and FDOA. The cluster occupies two orbital planes with the
same inclination but different Right Ascension of the Ascending Node of approximately 1˚. Inside each orbital plane, the spacecraft are unphased of about 1˚ in True Anomaly.
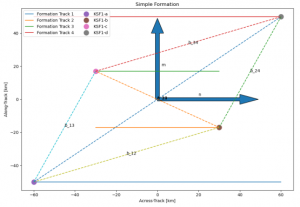 Diamond-shaped Spacecraft formation.
Diamond-shaped Spacecraft formation.
The optimal diamond-shaped formation is achieved at low latitudes (lower than 60° for clusters in polar orbits. As the spacecraft are moving towards the maximum orbital Latitude, the spacecraft tend to align
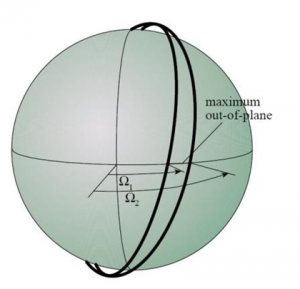 Cluster Orbit Representation.
Cluster Orbit Representation.
The effects of Earth’s perturbated gravity field are countered by maintaining the spacecraft altitude. The perturbation difference between the spacecraft are minimised and the cluster formation undergoes minimal changes through the control of spacecraft altitude. The spacecrafts’ onboard propulsion is used, as
needed, to maintain formation.


