
A powerful package of 3D mapping technology designed by CSIRO, Australia’s national science agency, has reached the International Space Station (ISS).
Astronauts will fit the device onto Astrobee, a NASA robot platform that roams the station and can assist with a range of tasks.
CSIRO Research Group Leader, Dr Marc Elmouttie, said the payload will create three-dimensional maps of the orbiting laboratory in greater detail than has ever been achieved before, with a goal of making life easier for astronauts.
“The goal for this mission is to demonstrate that our technology can provide enhanced 3D sensing and mapping for robotics systems on spacecraft, which may in future, perform autonomous caretaker operations on spacecraft,” Dr Elmouttie said.
“The device combines two CSIRO technologies – Stereo-Depth Fusion and Wildcat Simultaneous Localisation and Mapping – to produce high-quality data about the surrounding environment and its own movements through space.
“It is designed to showcase its potential to conduct full 3D internal scans, to help keep track of the movement of inventory around the station and assist astronauts and mission controllers in planning activities onboard the station.
“Combining information from a range of different sensors allows us to know not only what the robot’s surroundings look like, but also how that robot is moving through three-dimensional space.”
The payload was developed in partnership with Boeing, and with the support of the ISS National Laboratory and NASA Ames Research Centre, leveraging CSIRO’s long history of innovation in remote mining operations and high-resolution scanning for aerospace manufacturing and maintenance.
If multi-resolution scanning succeeds in this technology demonstration, CSIRO will develop the technology for other space applications.
This includes environments that are not fully crewed at all times and require remote monitoring and management, such as the future Moon-orbiting Gateway space station.
The team is also looking at potential applications for exterior hull scanning for Gateway, and lunar surface exploration planned as part of NASA’s Artemis program.
“This is really a jumping-off point for us. Once we’ve confirmed this type of payload can do the job, then the sky’s the limit,” Dr Elmouttie said.
“Boeing is committed to providing improved capabilities and enhancing safety for trips to the Moon and beyond,” said Scott Copeland, director for ISS research integration at Boeing.
“That requires the intersection of crew and robotic tasks, and the multi resolution scanning technology being demonstrated aboard our testbed in low-Earth orbit will be a powerful tool to help us meet those goals.”
Dr Ryan Reeves, technical director of research and innovation for the ISS National Laboratory, said: “The space station provides an invaluable tool to test and validate innovative technologies in low Earth orbit and further space commerce.”
“We look forward to the results from this project and the impacts it may have on the future of the low Earth economy.”
With the payload safely bound for the orbiting laboratory, the team now waits for its first experimentation run, slated for the Japanese Kibō module.
The multi-resolution scanning payload launched as part of SpaceX’s 30th Commercial Resupply Services-30 mission, contracted by NASA. The launch took place at Space Launch Complex 40 at Cape Canaveral Space Force Station in Florida at 7:55am on Friday, March 22 (AEDT).

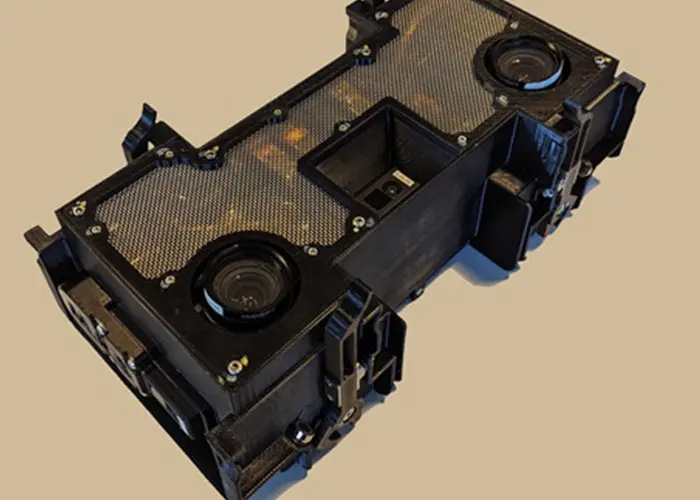
Image 1: The multi-resolution scanning payload, bound for the International Space Station.

Image 2: The flight-ready multi-resolution scanning payload, paired with an Astrobee robot, undergoes final integration testing at NASA Ames Research Center. A second, unused Astrobee can also be seen.
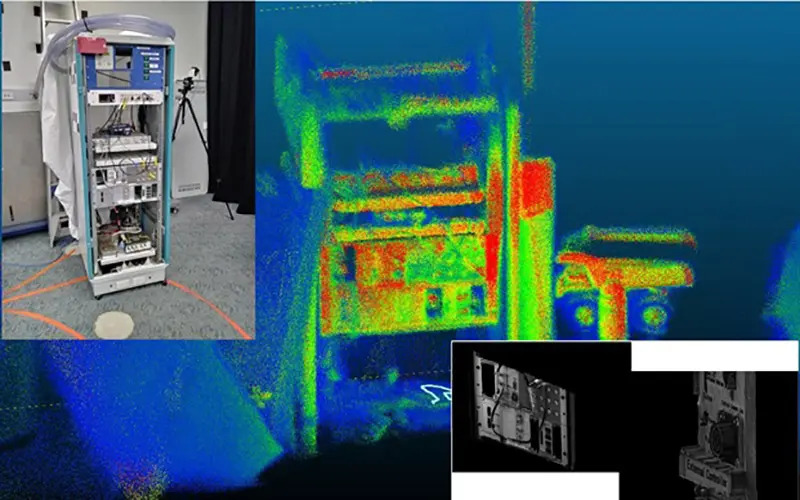
Image 3: A test scene at CSIRO showing the different resolutions (“multi-resolution”) 3D data generated by the MRS payload. From top left to bottom right: An image of the scene, a low resolution point cloud, and high-resolution 3D image.
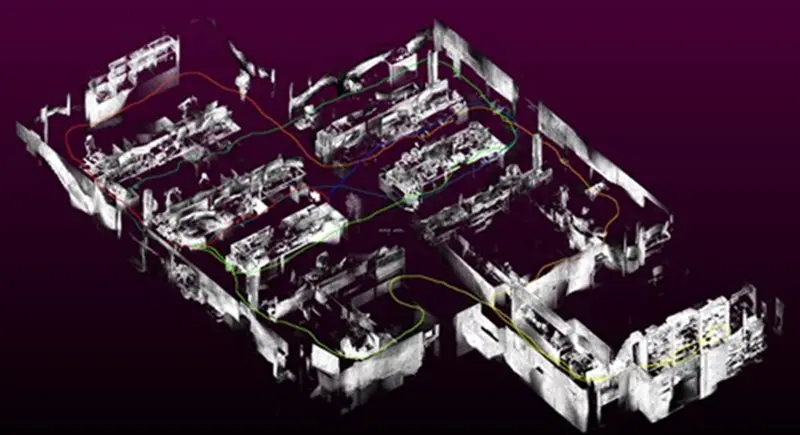
Image 4: A 3D model of a CSIRO office, with desks and walls shown in grey. Coloured lines show the device’s trajectory through the office space. This data was captured with Wildcat Simultaneous Localisation and Mapping onboard the multi-resolution scanning payload.


